
The Math of Motion: Visualizing Continuous Delta Encoding for Smooth Orientation


1. Introduction: The Challenge of Tracking Rotation
In high-fidelity robotics, competitive gaming, and physics-driven simulations, the ability to track an object’s orientation with precision is paramount. Whether a robotic manipulator is executing a delicate task or a camera is tracking a character’s movement, the system must record motion smoothly and continuously without sacrificing accuracy over time. Traditional methods often falter under the pressure of cumulative calculations, leading to “drift” or erratic behavior.
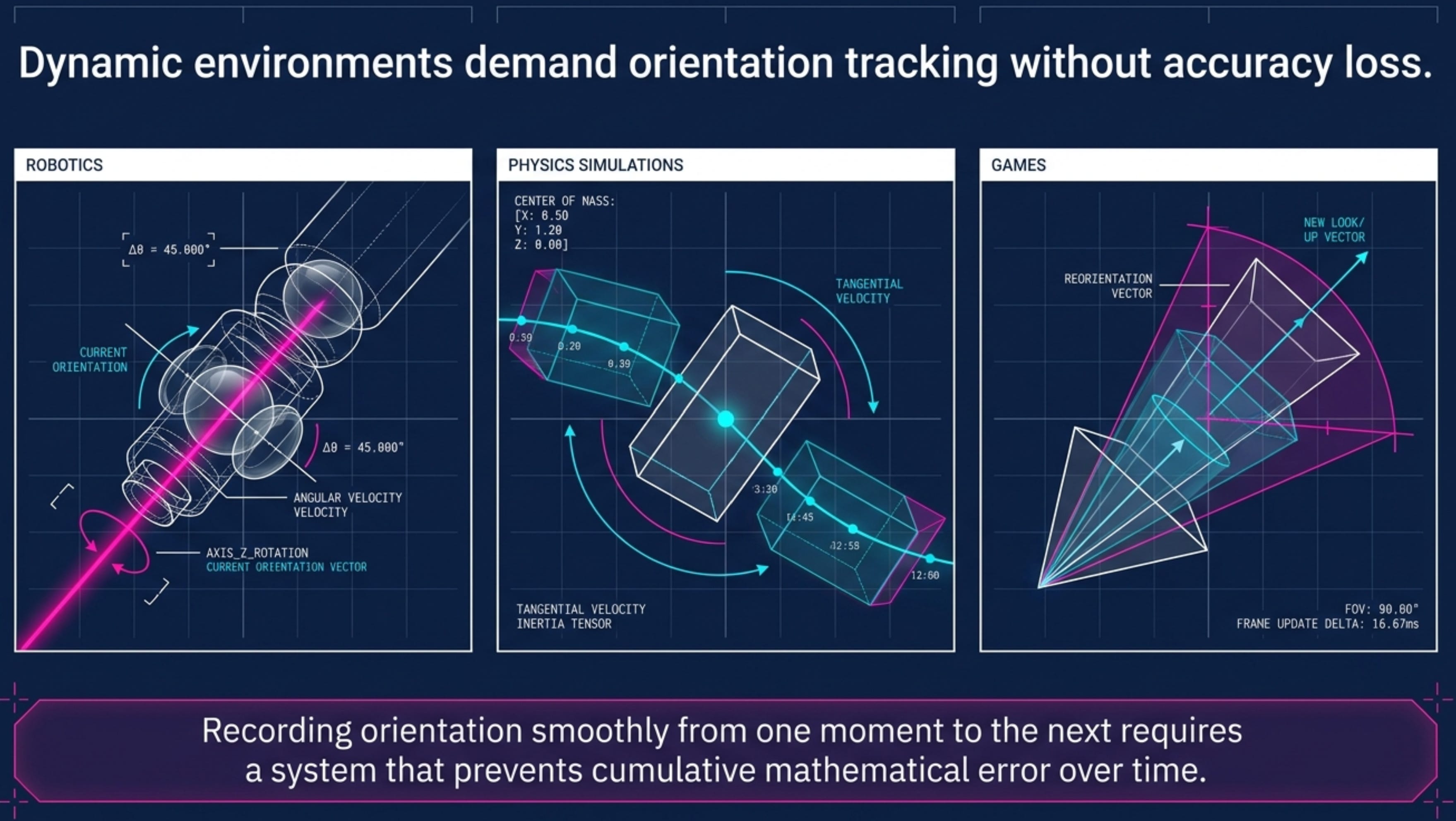
To overcome these hurdles, we utilize Continuous Quaternion Delta Encoding. This method records motion as a sequence of compact rotation updates, allowing us to reconstruct the exact orientation at any given moment. To grasp the mechanics of this solution, we must first establish a rigorous understanding of our primary mathematical tool: the quaternion.
2. The Foundation: What is a Quaternion?
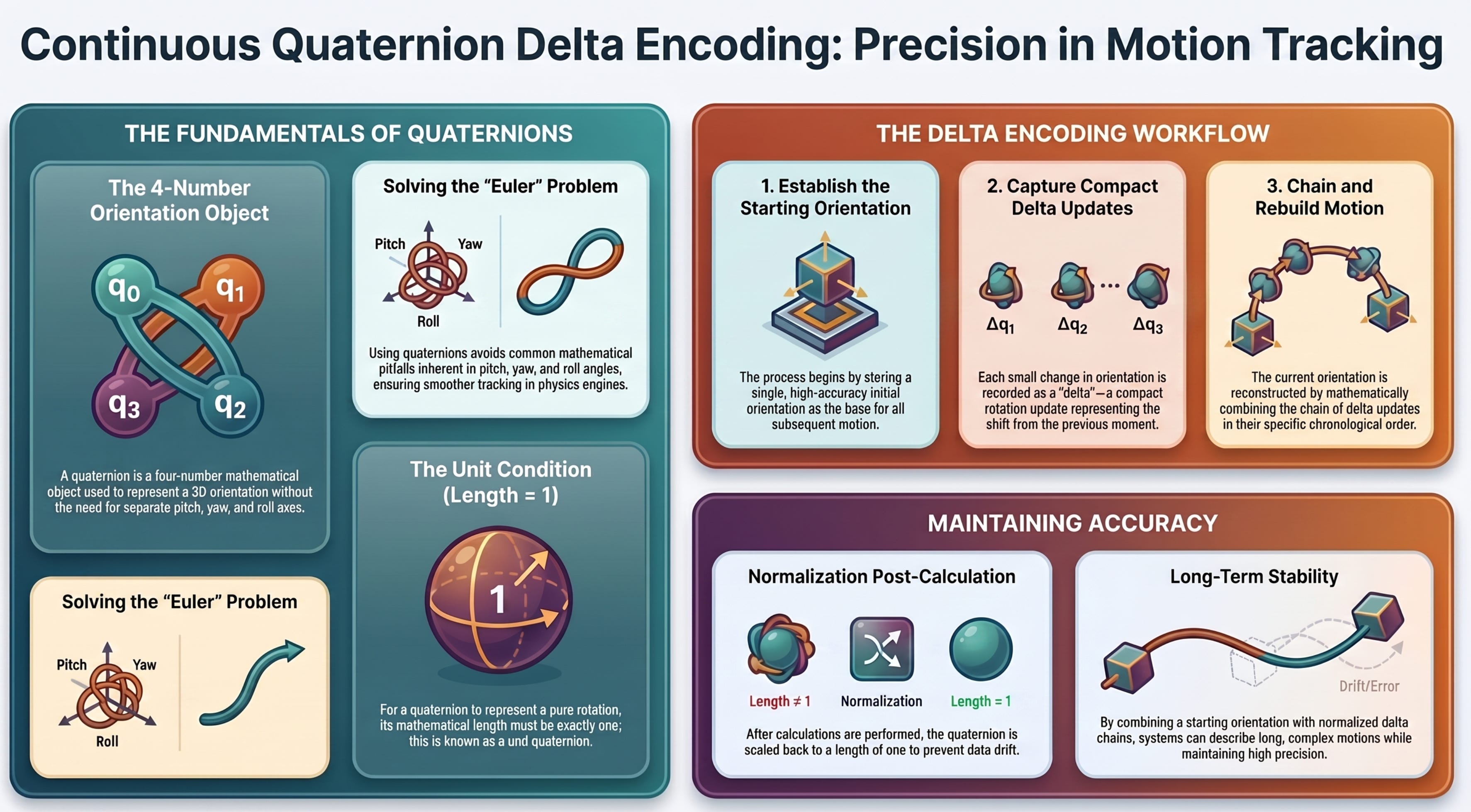
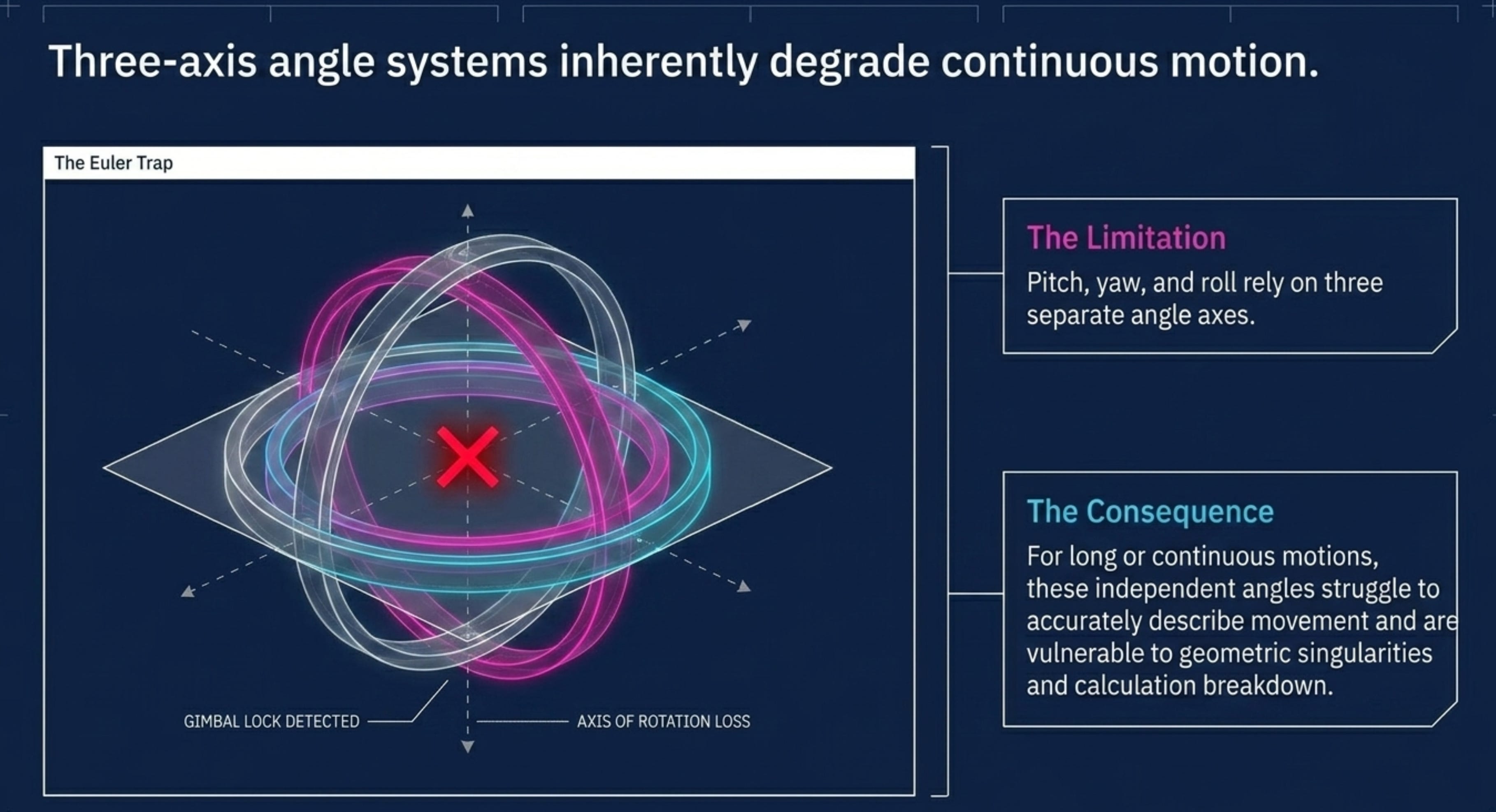
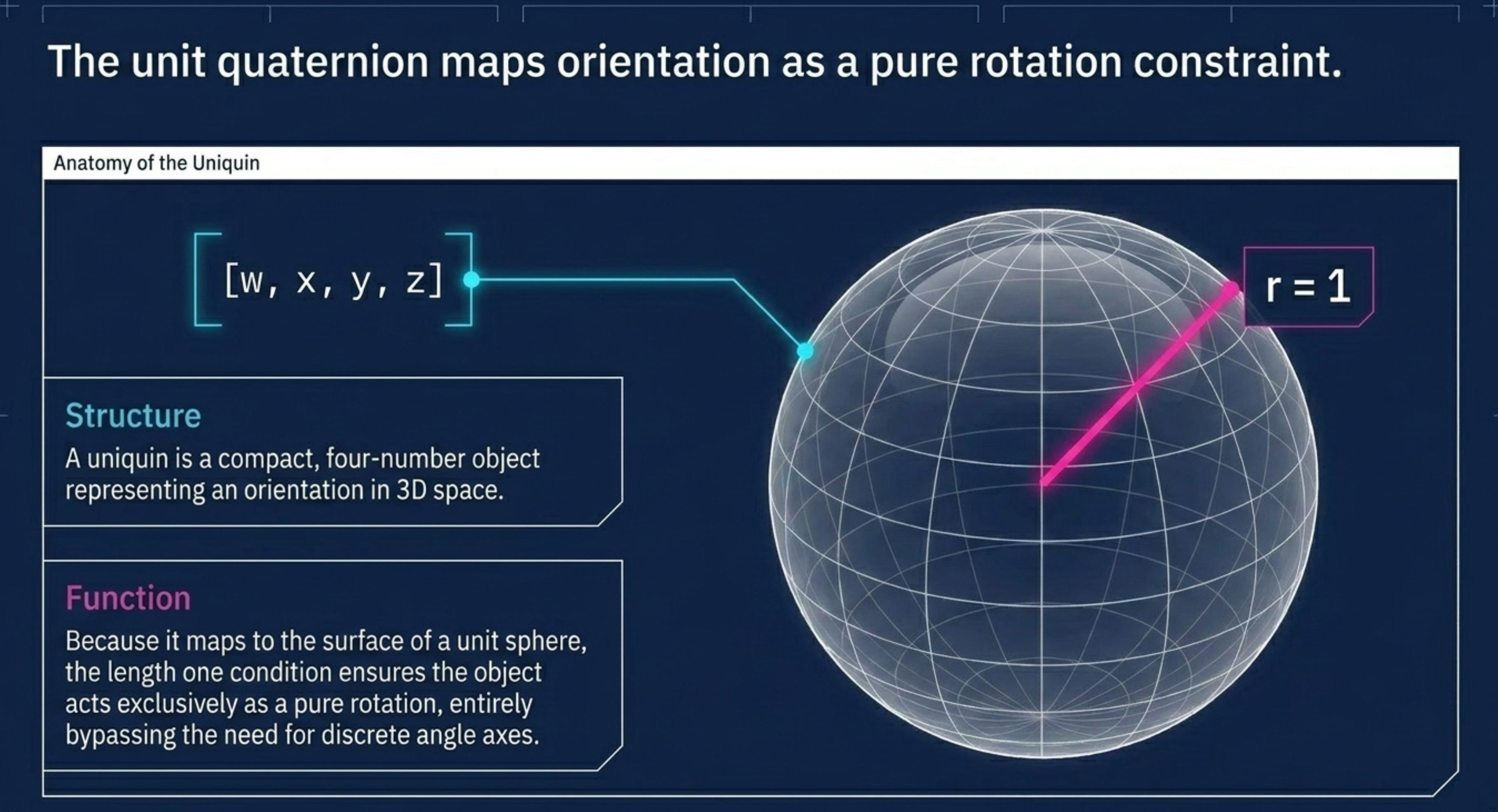
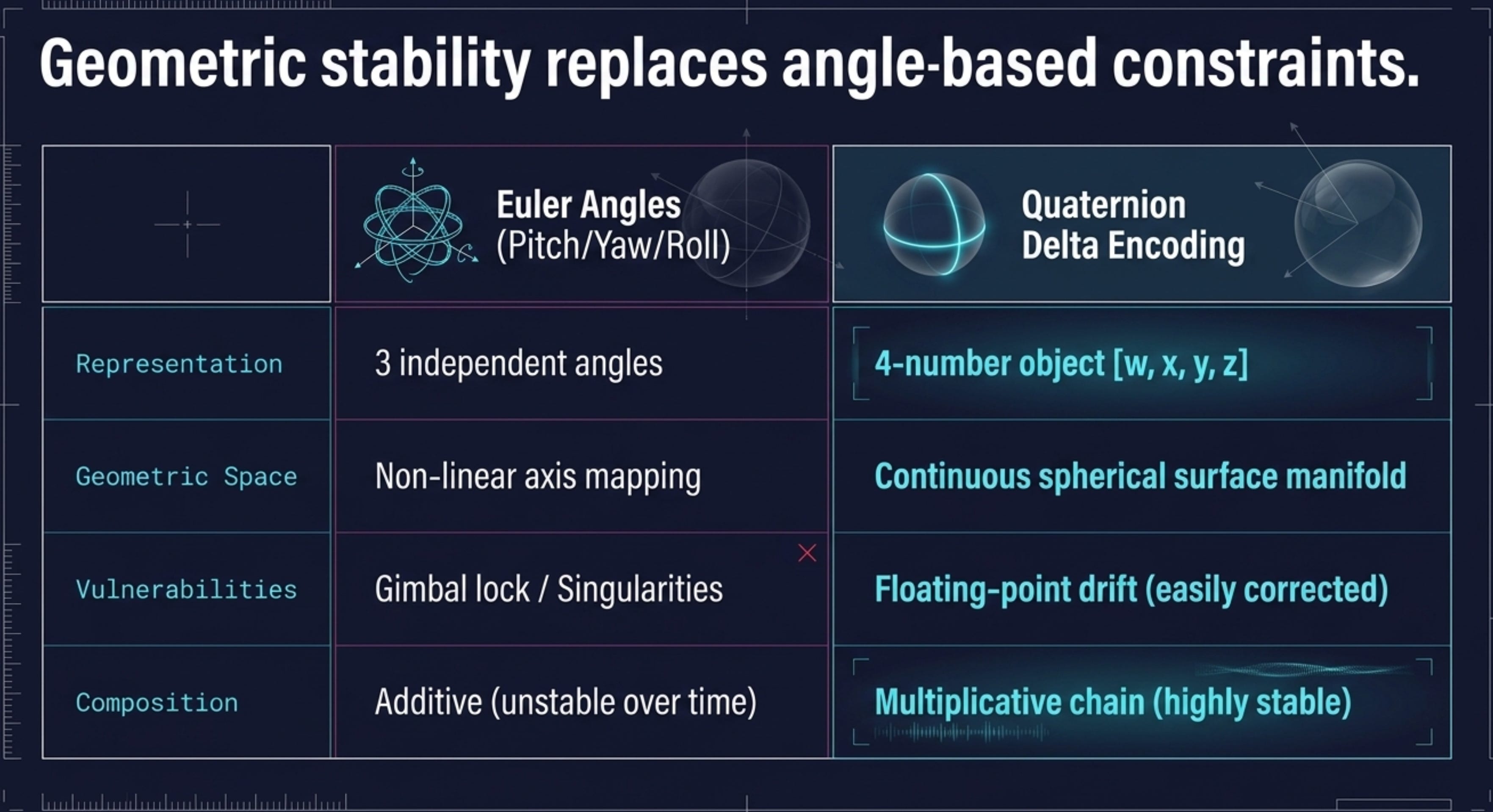
A quaternion is a unified “four-number object” used to represent an orientation in three-dimensional space. Unlike traditional Euler angles, which treat rotation as a series of disconnected movements, a quaternion provides a holistic representation of an object’s state.
To understand why quaternions are the industry standard, consider the following comparison between a Unit Quaternion and the traditional Pitch, Yaw, and Roll system:
Once we have established this four-number object with a length of one, we can begin to analyze how that orientation evolves through time.
3. The “Delta” Concept: Small Updates, Big Results
In computational geometry, a “delta” represents a relative change. Rather than recording the absolute orientation of an object at every timestamp, which is data-intensive and prone to error, we focus on recording the change in orientation. This is known as a compact rotation update.
We apply a rigorous three-step logic to delta encoding:
Stored Orientation: We maintain a known, absolute starting orientation.
Small Changes: We record a sequence of “tiny changes” (deltas) occurring between frames.
Rebuilding: We reconstruct the current orientation by combining these updates in their exact sequence.
Why is this approach superior? Recording the change (delta) is significantly more data-efficient than recording a full state. By treating motion as a series of relative updates, we avoid the mathematical inconsistencies of fragmented angle systems. This ensures a smoother flow of data and preserves the integrity of the motion path.
4. The Process: Rebuilding the Chain of Motion
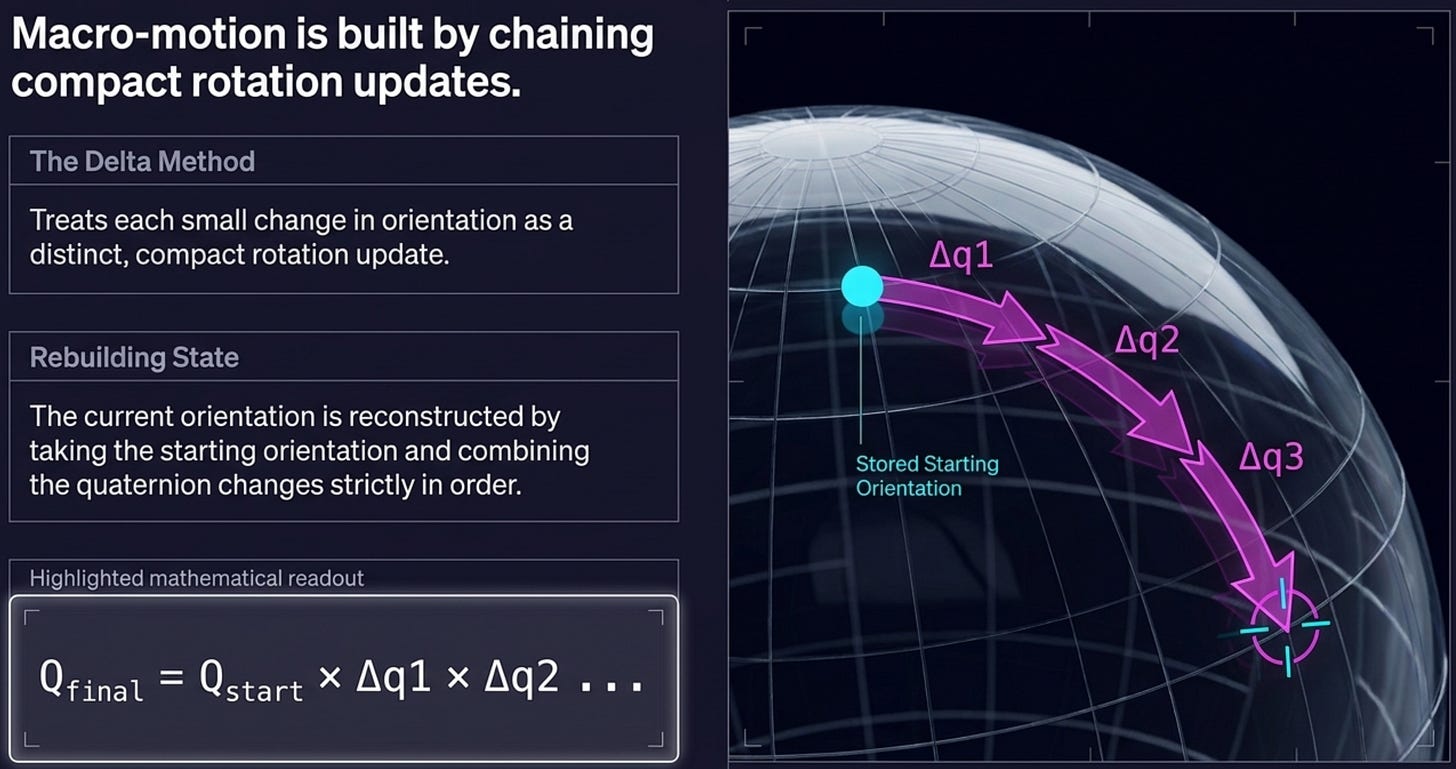
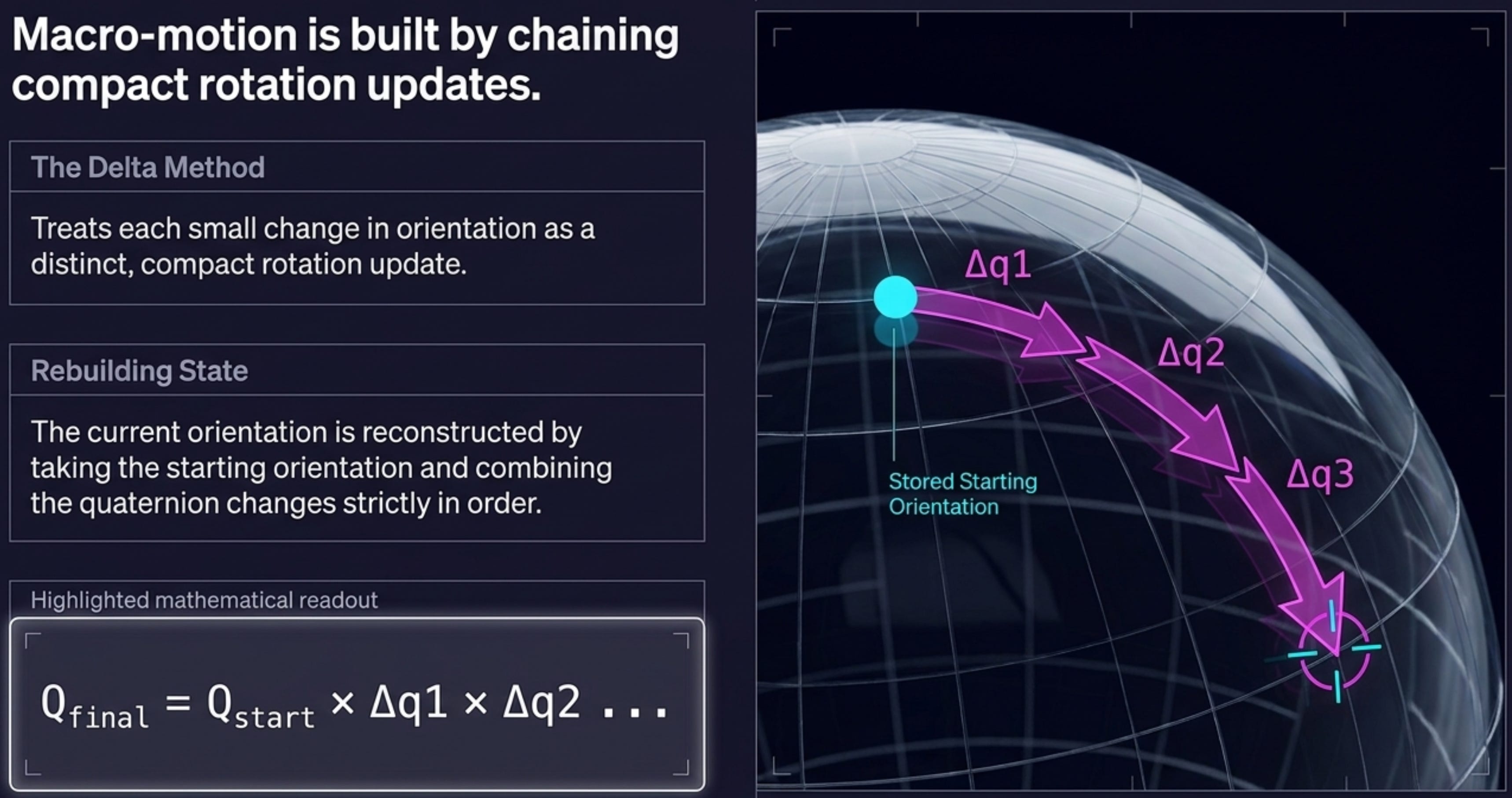
We visualize long-duration motion as a mathematical chain. Each movement is not an isolated event but a link connected to the one before it.
Visualizing the Chain By starting with an initial orientation and appending a sequence of small quaternion deltas, a system can describe complex, high-frequency motion over extended periods. Because each delta is a relative update, the entire orientation history is contained within this sequence.
Key Insight: The order of updates in the sequence is non-negotiable. Because each link in the chain is a relative change from the previous state, missing or reordering a single delta will break the entire orientation history, leading to a complete loss of accuracy.
While this chaining process is robust, it requires constant maintenance to prevent the accumulation of numerical errors.
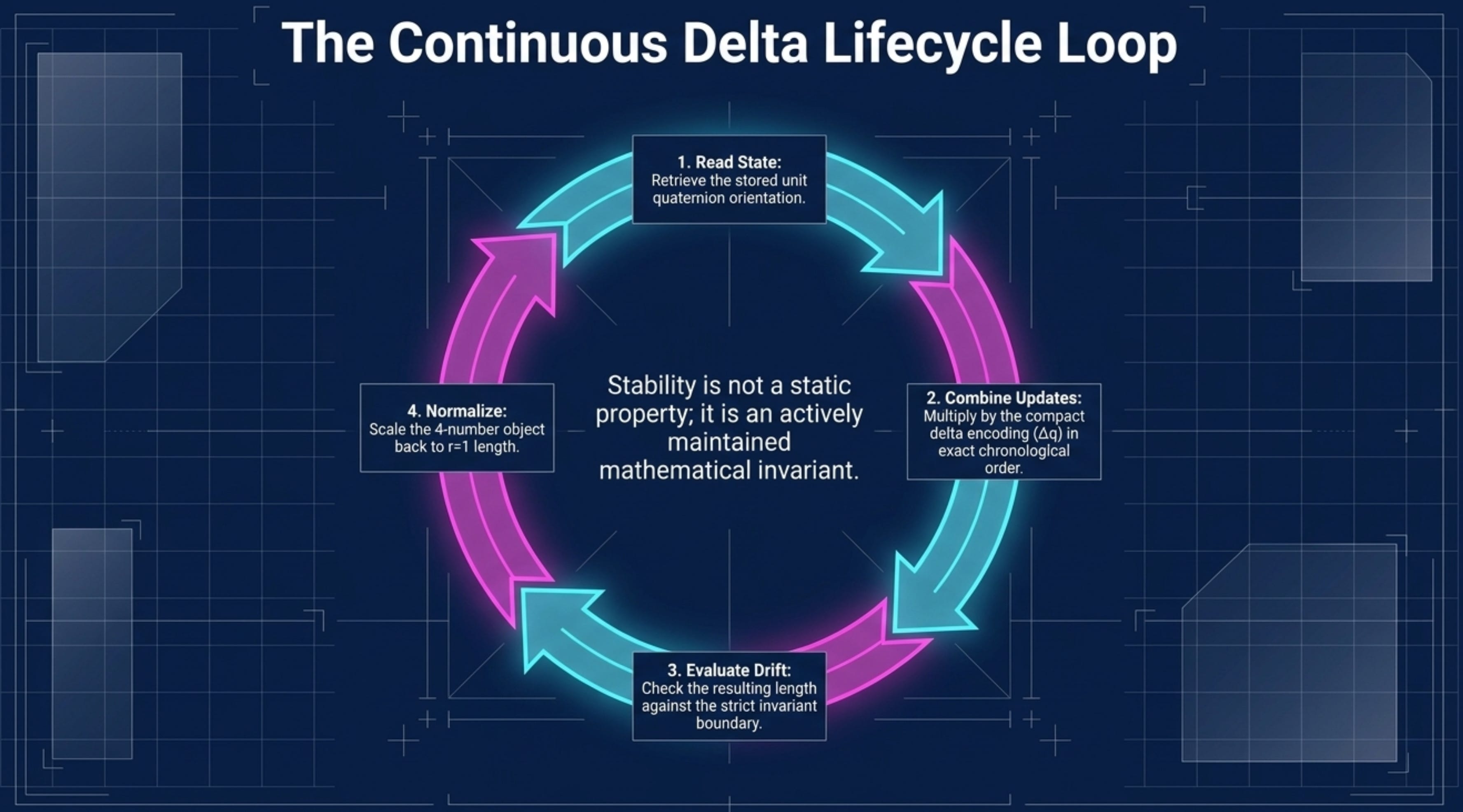
5. Maintaining Precision: The Role of Normalization
To ensure a quaternion functions as a “pure rotation,” it must satisfy the Unit Condition. This means the mathematical length of the quaternion must be exactly one.
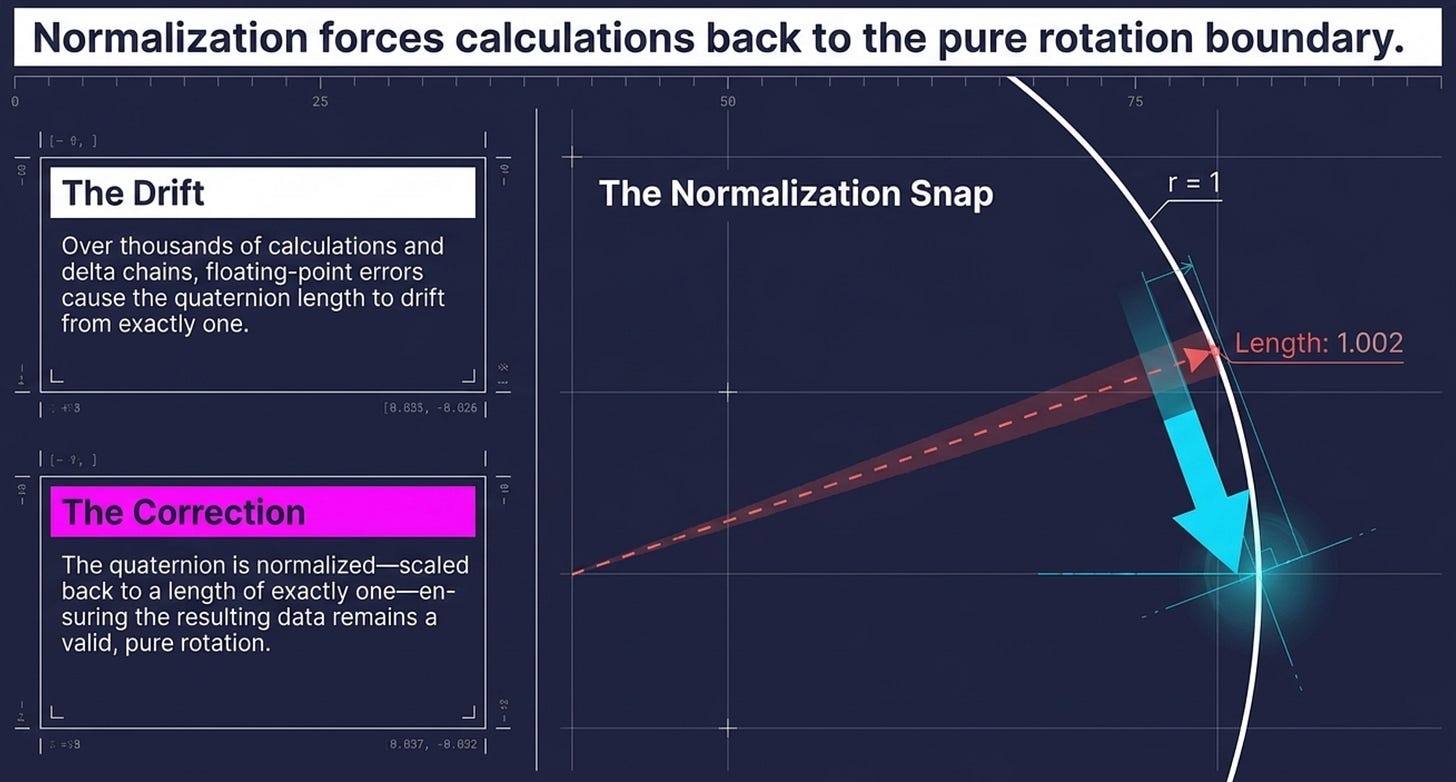
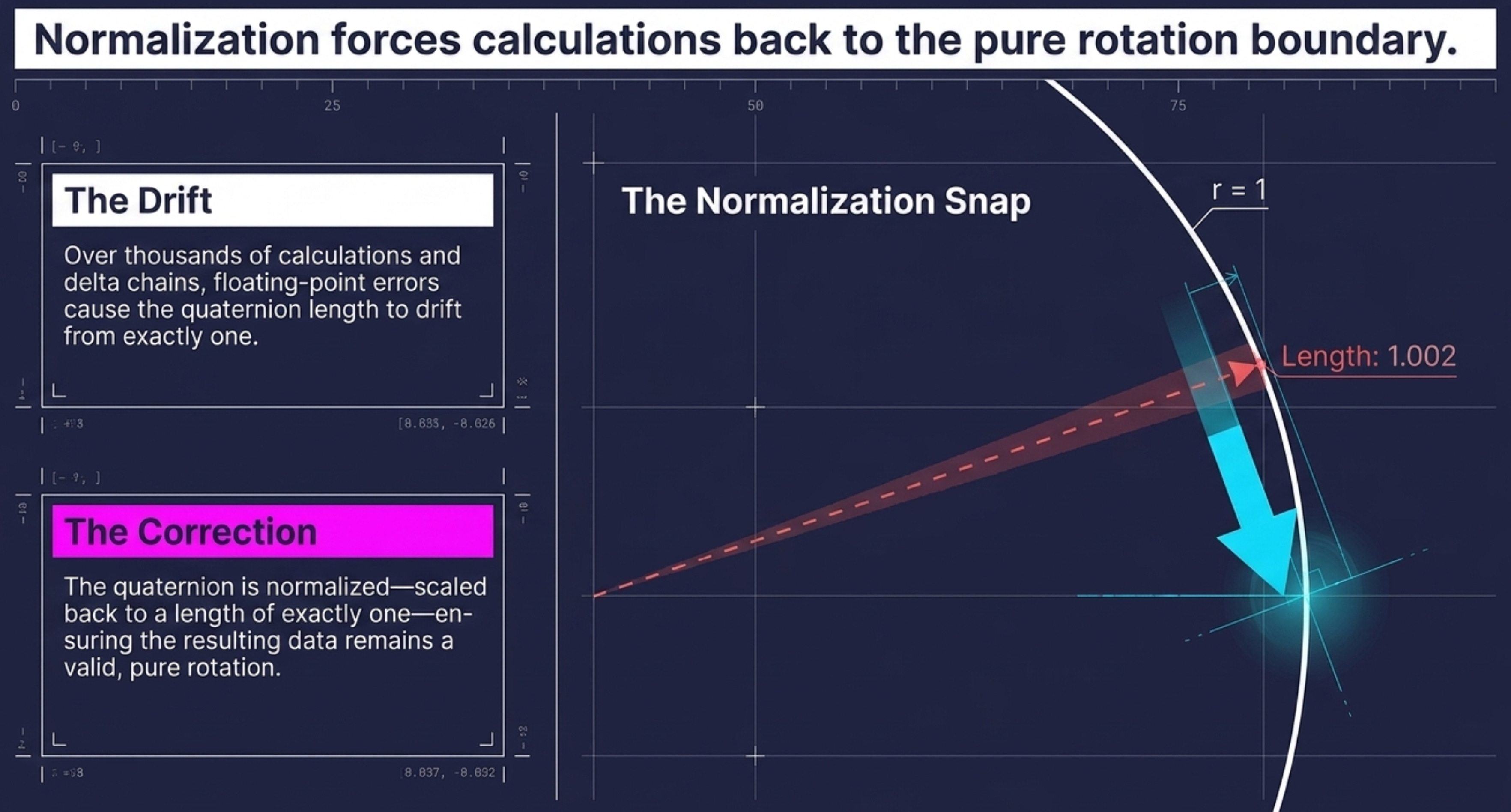
However, during high-speed calculations and the continuous chaining of updates, we encounter Mathematical Drift. Small rounding errors accumulate, causing the quaternion to lose its “Unit” status. To correct this, we employ Normalization:
Enforcing the Unit Condition: We scale the quaternion back to a length of exactly one after calculations are performed.
The Necessity of Scaling: Without normalization, the quaternion ceases to represent a valid rotation, causing the object to “distort” or “warp” in the simulation.
Preserving Accuracy: By enforcing the length-one requirement, we prevent mathematical drift from degrading the precision of our motion tracking over time.
6. Summary: The “So What?” of Delta Encoding
Continuous Quaternion Delta Encoding is the definitive method for managing 3D motion. For those mastering robotics or simulation, these are the essential takeaways:
Efficiency: Compact updates minimize data overhead, allowing us to describe long, complex motions with a fraction of the data required by absolute state recording.
Stability: By moving beyond fragmented pitch, yaw, and roll axes, we eliminate the tracking problems inherent in traditional systems.
Accuracy: The synergy of a fixed starting point, a rigid sequence of relative updates, and constant normalization creates a superior framework for tracking movement without losing precision.
Check Your Understanding
Question: Why must a quaternion be “normalized” (scaled back to a length of one) specifically after calculations are performed?
[Owl Academy — Quaternion Delta Encoding Tutorial (Minor Tome)]
Hint: Consider what happens to the “Unit Condition” when mathematical drift occurs during the chaining process (Reflect on Section 5).
[Twitter] [YouTube] [Owl Academy]
 | A guest post by
|